こんにちは。科学コミュニケーターの伊藤です。
先日、ロボットの実証実験を昨年9月より実施しているとブログでご紹介しましたが、皆さんは現場でご覧になりましたか?
遠方にお住まいの方々も、ロボットが動く様子を動画でアップしているので、ぜひご覧になって下さいね。
さて、このブログでは、実証実験を通して何が分かったのか、そして、これからの展望について研究代表者の佐々木洋子さんにお話を伺ってきました。

研究施設があり、そこにお邪魔しました。
はじめに
ここで佐々木さん達が実験に使ったロボット「ピーコック (Peacock)」について、おさらいをしておきましょう。
英語で「クジャク」を意味する自走ロボットのピーコックは常設展示フロアで以下の2つのことをしています。
①人を避けながら目的地へ進む
②周りの人の動き方を学ぶ
人を避けるためには周りを「見る」必要があります。その「見る」ための人間で言う目に当たる部分が、ピーコックの中心にある銀色の物体です。ここから「赤外線」という人の目には見えない光を飛ばし、人や壁などの物体に当たって反射した光を銀色の物体でキャッチします。その時までにかかった時間から物体までの距離を測定することで、どこに人がいるのか、どこに壁があるのかを判断しています。
それと同時にピーコックは周囲にいる人の動き方から、「どこが人の通りやすい場所」で、「どこが人の集まる場所」なのかを学んでいます。
通常、ロボットが目的地を目指すときは最短距離で行こうとしますが、ひょっとすると、その途中に「人が集まる場所」があったり、「子どもたちが遊ぶ場所」があったりするかもしれません。そこで「周りの人がどうやって動いているのか」を学び、「人が通る『通路』がどこにあるのか」を学んでいるのです。
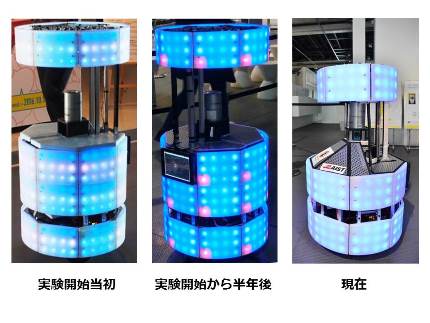
目に見えない部分も含めて着実に改良されています。
これまでの実証実験でわかったこと
未来館での実証実験を通して、ピーコックは改良が加えられてきました。たとえば、当初、来館者から寄せられたご意見として「ロボットが何をしているのか、何をしたいのかがわからない」というものが多くありました。
来館者の方々は、ピーコックに興味をもって集まってきます。すると、ピーコックの周囲に人だかりができてしまい、目的地までのルートを探せずに立ち往生してしまうケースが多く発生しました。その時、周りで見ていた人たちには「ロボットがただ止まっている」ようにしか見えなかったと思います。
人間であれば、そこで「すいません、通してください」など一声かけることができますが、ピーコックはできません。そこでピーコックの外装に付けられているLEDのうち、一部を赤く光らせることで次の目的地までのルートを見つけることができず「困っている」ことを周囲の人に伝える事ができないかと考えました。

結果は上々。この変更により以前より身動きできない状況は減ったと思います。
また、他にもピーコックは「開館中の平均移動速度」や「周囲にいる人の歩いた跡(歩行軌跡)」などの基礎データを取得しており、今後の研究に活かすことができるデータが着実に増えている状態です。
一方で、人の動きから通路がどこなのか学習する予定でしたが、常設展示フロア内は通路の自由度が高く、正確に通路がどこなのかを判断するのは現状では難しいそうです。
ただ、私たちも人が大勢いる環境で「通路がどこなのか」を正確に判断するのが難しい場面がありますよね(図4)。そう考えると、人混みを通り抜けるというのは、何気ない行動ですが、実は意外と「高度な行動」と考えることができるかもしれません。

通路を見つけるのは人間でも難しい状況かもしれません
(画像の一部を加工しています)。
これからの展望
佐々木さん達の研究グループでは、これまでに分かったことや出来なかったことを踏まえて、新たな改良プランを考えています。
例えば、ピーコックの「移動速度の変化」や周囲にいる歩行者の歩いた跡の数(つまり歩行者の数)」から、混雑状況を推定することができるかもしれません。
現在は、人を避けながら目的地に進むことしかできませんが、混雑状況が判断できるようになれば、空いているときは通路の真ん中を優先的に進んだり、混雑時には通路の端っこを進んだりすることで、人混みの中でもより自然な移動ができるようになるかもしれません。
また、他にも周囲の人の動きから、その人の「行動」も判断できるようになるかもしれません。その判断基準はピーコックとの「距離」です。ある一定時間におけるその人とピーコックまでの「距離」がどのように変化するかで判断できる可能性があります。
例えば、ピーコックに近づいてきて「本当にぶつからないのかな?」と思ってピーコックの周りをウロウロしている人との距離はおおよそ一定を保つはずです。(図5)。

一方、単にピーコックの近くを通りかかった人は段々とピーコックに近づいたあと、どんどんと離れていく、つまり距離が「変化」することが予想されます。そのため、ピーコックとの距離の変化をみることで、その人の行動をある程度判断することができるでしょう。周囲の人の行動を判断できるようになれば、人混みの中で、さらにスムーズに移動できるようになるかもしれません。
さいごに
人混みの中をさらにスムーズに動くことができそうなピーコック。皆さんだったら、そんなロボットでどんなことが出来るようになると思いますか?今までに来館した方々の意見で最も多かったのは「人の代わりに何かをする」というもの。物を運ぶ、持って行く、警備をする、誘導をする、料理をするなどなど、やはり人間の「代替手段」としてロボットを考えている人が多い印象でした。
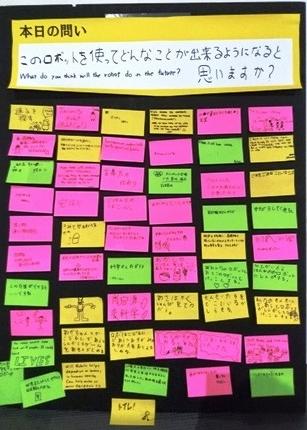
ひょっとするとこれ以外にも人混みをスムーズに動けるロボットが使える場面はあるのかもしれません。引き続き、これからのイベントでもアイデアを募集し続けますので、ご来館の際にはぜひアイデアを付箋に書いてみてください。このブログのコメント欄にアイデアを書いて頂いても構いません。次回のイベントは8月4日(金)と5日(土)、その次が9月15日(金)と16日(土)になります。
それ以降も月に1回のペースで実験を行っていく予定です。お時間があえば、未来館へぜひ遊びに来てくださいね!




