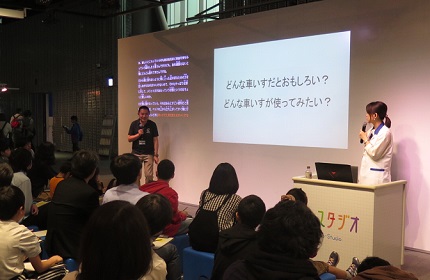
史上初の10連休となった2019年のゴールデンウイーク。みなさんはどう過ごされましたか?連休中、未来館にはたくさんのお客様にご来館いただきました。そしてその真っただ中である5月2日、トークセッションを開催しました。タイトルは「車いすで階段をのぼれ! 競技大会「サイバスロン」への挑戦」(告知ブログはこちら https://blog.miraikan.jst.go.jp/event/20190423post-852.html)。
今回は当日の様子を、科学コミュニケーターの田中がお伝えします。

(撮影:相川直美)
(撮影:相川直美)
開発中!階段をのぼる車いす!
今回お招きしたのは、千葉工業大学先進工学部未来ロボティクス学科 青木岳史准教授。そしてトークセッションのタイトルの通り、青木先生は階段をのぼれるような車いすを開発中です。その車いすがこちら。ふだん街で目にする車いすとは違う形をしていますね。階段をのぼるためのポイントはどこにあるのか? さっそく、迫っていきましょう!

(画像提供:青木岳史先生)
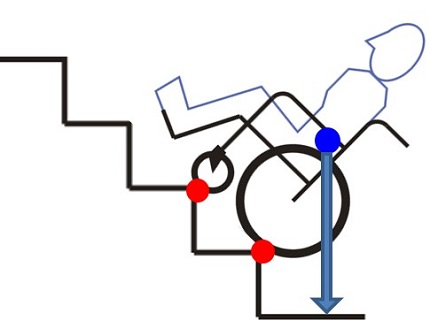
車いすで階段をのぼる難しさ
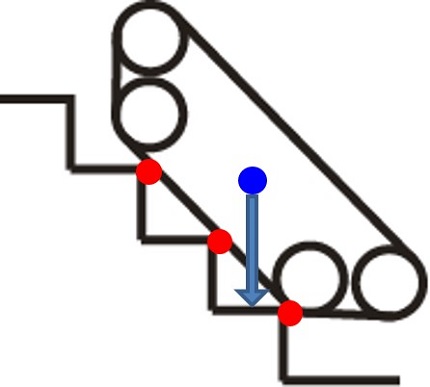
車いすにとって階段が難しいのは、段差があるからだけではありません。階段をのぼろうとすると車いすは斜めになり、ふつうの車いすでは後ろにひっくり返る危険性があります。なぜひっくり返るかというと、階段と車いすの接地している点よりも重心が後ろになるから。では、接地点の間に重心がくるようにするには...と考えると、たとえば「長い車いすにする」という解決策が浮かんできます。
(画像提供:青木岳史先生、許可を得て改変)
(画像提供:青木岳史先生、許可を得て改変)
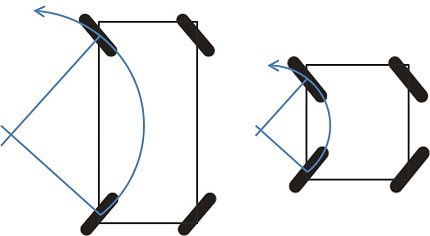
しかし、長い車いすにも問題があるそう。それは小回りが利かなくなるということ。小回りが利かないと、人混みの中を人とぶつからないように進むことも難しくなってしまいます。
(画像提供:青木岳史先生、許可を得て改変)
青木先生チームの車いすのポイント
あちらを立てればこちらが立たず......。では、どうすれば階段ものぼれて小回りが利く車いすができるでしょうか?青木先生チームが考え抜いた答えが、写真で紹介したこちらの車いす。長い車体でなくても、階段でひっくり返らないように、乗り手(パイロット)が座るシートを前後に動かすことで、重心を変えられます。また、クローラを採用することで、階段や斜めの地面、でこぼこ道もしっかりと捉えて進めます。
(画像提供:青木岳史先生)

(画像提供:青木岳史先生)
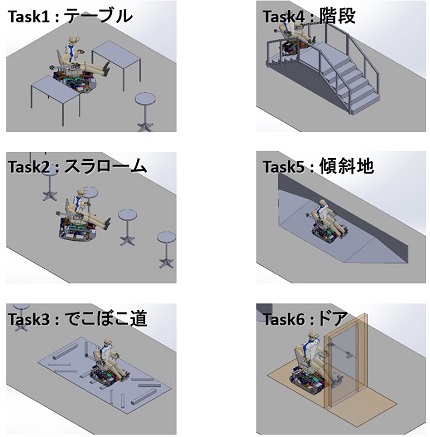
実は、写真の車いすは、未来館でのトークセッションの3日後に迫った国際競技に参加する実機です。その競技とは「サイバスロン(*)」。車いすの技術を競うための大会です。課題は、テーブルにつく、障害物をよけるスラローム、でこぼこ道、階段、傾斜地を進む、ドアを手前に開けて通るの6つ。どれも日常的な動作です。なぜこれを競うのでしょうか?それは、ごく当たり前の生活の中に、今の車いすにとっての障害がたくさんあるから。サイバスロンには、車いすではできないことをなくしていきたい!という想いが込められています。
(画像提供:青木岳史先生、許可を得て改変)
・完全に気密なクローラロボット「SCV I」
でこぼこだらけのオフロードを進めるタイヤといえば、クローラ(いわゆるキャタピラ)が思いつく人も多いのではないでしょうか。ですが、一般的なクローラは隙間がたくさんあり、中にゴミが入ると動かなくなるという難点も。そんなことがないように、青木先生は全面をベルトで覆う構造で「SCV I」を作りました。これで、中にゴミや水が入らず、被災地のようなガレキや土砂だらけの場所でも進んでいけるそうです。
・段差をのぼる全方向移動ロボット「Eggbeater2」
「Eggbeater2」のタイヤは泡立て器のような形。上のSCVI とは逆の発想で、ゴミが入ってもすぐに出ていくように、隙間だらけに。4つのタイヤがくるくると回りながらあらゆる方向に進め、タイヤを1つずつ持ち上げて段差をのぼることもできます。
・月面探査ローバー「Tri-star IV」
月を探査する月面ローバー「Tri-star IV」。月は細かい砂に覆われているため、砂地を進めるものでなければいけません。そして月は地球よりもずっと気温差が激しい場所。劣化しやすい素材のゴムはタイヤには使えません。「Tri-star IV」のタイヤには、砂地を進め、気温差に耐えられるよう、ステンレスのバネを使ったそうです。また、月ではクレーターに入ってひっくり返ってしてしまうこともあるでしょう。そんな時も自分で起き上がるという重要な機能も備えています。
いかがでしょうか? ロボットづくりでは、ガレキだらけの場所や細かな砂のあるところなど、移動するにはかなり難易度の高い場所が想定されています。技術の確かさだけでなく、発想の自由さも求められていることがわかります。ロボットづくりのノウハウが、車いすに活かされるようになれば、今までの車いすには難しかったようなことも、きっとできるようになるはずです。
こんな車いすもできないかな!
青木先生から、これまでに開発したロボットや、まさに開発中の車いすについてお話しいただいた後は、お客さんから質問やご意見を先生にぶつけていただきました。ここでは、その中から2つピックアップして、先生のお答えとともにご紹介します。
Q1. 「蛇型ロボットは段差を越えられるから、車いすに応用できませんか?」
A1. 「実は、研究で蛇型ロボットを作っています。ですが、車いすにするのは難しいと思います。なぜなら、長さが長くなってしまって、人混みの中ではぶつかってしまうから。ですが、たとえば山登り専用の車いすとして作るのなら、おもしろいかもしれません」
Q2. 「立ったまま使える車いすは作れますか?」
A2. 「立ったままというのはとてもいいアイデアです。ふつうの車いすだと、歩いている人よりも視点が低くなります。それが歩いている人の視点の高さと合うようになるというのはとても重要なことなんです。また、立ち姿勢だと狭いところも通りやすくなります。ただ、立ったままの車いすに乗れるかは、乗られる方の障害の程度にもよると思います。また、重心が高くなるのでバランスを取りづらくなり、そうすると段差を越えられなくなってしまうので技術的には難しいですが、実際に立ったままの車いすの研究をしている人もいます」
みなさんからの意見が次の研究開発につながるかも!
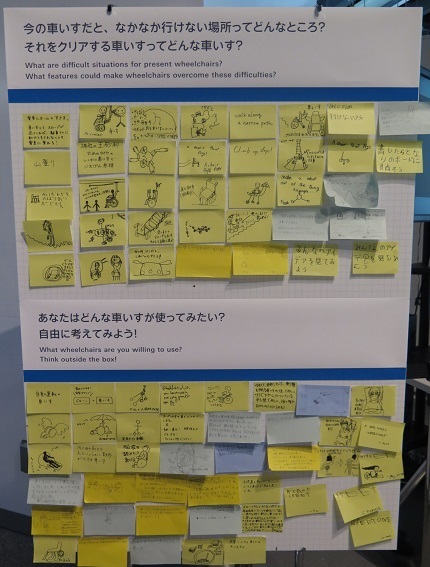
この他にも「小さいお子さんを乗せられる2人乗りの車いすがあったらいい」、「目的地を設定したら自動で連れていってくれないかな」など、たくさんの意見が集まりました。この日、トークセッション以外の時間にもみなさんからアイデアを集めたところ、全部で100枚を超えるアイデアのふせんが集まりました! こうして青木先生のもとに届けたみなさんの意見から、実際の車いすやロボットの研究につながるものもあるかもしれません。
また、「車いす=歩くのが難しい人のためのもの」という考えに捉われない意見もたくさん頂きました。みなさんの意見から開発が進んだ車いすが、将来、みなさん自身も含めたたくさんの人にとって役立つものになるかもしれませんね!
*サイバスロン
2016年にスイスで始まった障害を持つ方のための技術を競う国際的な競技大会です。障害を持つ方と技術者がタッグを組んで最新機器を開発し、日常の動作を想定したいくつかのタスクをこなす技術を競います。車いすだけでなく、義手や外骨格など、6種類のレースで構成されます。第2回のサイバスロンは2020年にスイスで行われる予定ですが、それに先立って2019年5月5日、サイバスロンのスピンオフ大会として、車いすだけのレースが川崎市にて開催されることとなりました。青木先生が目指した大会が、この「サイバスロン車いすシリーズ日本2019」(本文中、こちらを「サイバスロン」と呼びました)です。
【関連リンク】
・トークセッション告知ブログ https://blog.miraikan.jst.go.jp/event/20190423post-852.html
・サイバスロン車いすシリーズ日本2019観戦記事 https://blog.miraikan.jst.go.jp/event/20190704post-863.html
・サイバスロン車いすシリーズ日本2019 https://www.cybathlonseriesjp.com/(リンクは削除されました。また、URLは無効な場合があります。)