こんにちは!科学コミュニケーターの田中です。前回の田中のブログでもお伝えしたように、未来館ではゴールデンウイーク真っただ中の5月2日、トークセッション「車いすで階段をのぼれ! 競技大会「サイバスロン」への挑戦」を開催しました(イベント報告ブログは→https://blog.miraikan.jst.go.jp/event/20190628post-862.html)。そしてトークセッションにお招きした千葉工業大学 青木岳史准教授は3日後の5月5日に「サイバスロン」に出場!ということで、先生たちの勇姿をこの目で確かめてきました!

(画像提供:ETH Zurich / 越智貴雄)

(撮影:相川直美)
「サイバスロン」ってなに?
まず、「サイバスロン」についておさらいです。青木先生が出場されたのは、2016年にスイスで始まった障害を持つ方のための技術を競う国際的な競技大会「サイバスロン」のスピンオフ大会「サイバスロン車いすシリーズ日本2019」(以下、こちらを「サイバスロン」と呼びます)。サイバスロンでは、タイムが速ければ勝ちというわけではありません。肝心なのは、タスクの難易度に応じた獲得ポイント。難易度の異なる6つのタスクがあり、どれをこなせたかで点数が決まります。これらの6つのタスクは、どれも日常生活に必要な動作である点が大きな特徴です。サイバスロンは、ふつうの車いすではできなかった日常動作をこなす技術を競います。そして、サイバスロンをきっかけに、こうした技術開発が進むことを目指しているのです。
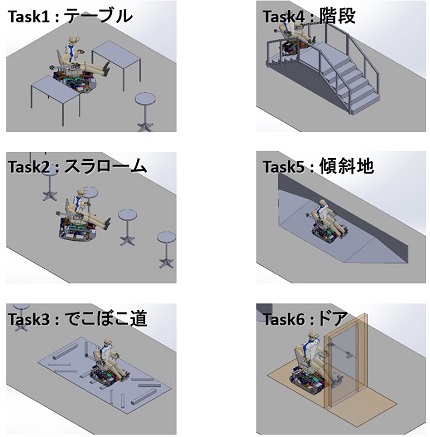
(画像提供:青木岳史先生、許可を得て改変)
青木先生によるトークセッションの開催日は、サイバスロン本番の3日前。その時点では青木先生チームの車いすはまだ階段をのぼることに成功していませんでした。果たして、先生たちの車いすは階段をのぼれるようになったのか?! そして他チームの車いすは?!
いざ、会場へ!
サイバスロンの会場となったのは神奈川県川崎市にあるカルッツかわさき。あらゆる人に使いやすいユニバーサルデザインに配慮した、スポーツや文化のための複合施設です。

(撮影:相川直美)
ドキドキしながら会場に入ると、立ちはだかる2つのレーン。この後の競技で、車いすたちが挑むコースです。2つの四角いテーブルの間隔もスラロームを構成する丸テーブルの間隔も、想像以上に狭く見えました。こんな隙間を電動車いすが本当に通れるのか、と疑ってしまいます。レースでは2チームが同時にスタートし、タスクをクリアして獲得できる得点とタイムを記録していきます。各チーム2回ずつチャレンジして2回の合計で順位を出し、さらに1位と2位チームで決勝戦、3位と4位チームで3位決定戦のレースを行います。

(撮影:田中沙紀子)
開会の挨拶に続き、選手入場が始まりました。青木先生とパイロットの阿部武蔵さんも笑顔で登場。チーム名は、千葉工業大学(Chiba Institute of Technology)の略称で「Team C.I.T.」。先導するのは、講演や動画配信などの活動をしている車いすユニット「BEYOND GIRLS」のメンバー、梅津絵里さんです。出場チームは全部で8つ。日本だけでなく、スイスやロシアなどからも集まりました。

(画像提供:ETH Zurich / CYBATHLON)
レース開始!
各チームの入場が終わったら、いよいよレース開始です!他のチームの熱戦を見守りながら、Team C.I.T.の出番を待ちます。そして登場したTeam C.I.T.!写真でその様子をお伝えしましょう。

(画像提供:ETH Zurich / CYBATHLON)

(画像提供:ETH Zurich / CYBATHLON)

(撮影:相川直美)

(画像提供:ETH Zurich / CYBATHLON)

(画像提供:ETH Zurich / 越智貴雄)

(画像提供:ETH Zurich / CYBATHLON)
最終的なTeam C.I.T.の順位は、7位という結果でした。Team C.I.T.はクリアできないタスクもありましたが、レース後に青木先生にお話を伺うと「Team C.I.T.は開発期間が短かったのですが、その中でどこまでできるか、実際に車いすを作ってレースに挑めたことは大きな収穫です」と語ってくださいました。
青木先生とのトークセッションを企画・実施した筆者としては、ぜひとも先生のチームの車いすが階段をのぼる姿を見たい!と思っていました。叶わなかったことに残念な気持ちがないとは言えませんが、先生の前向きな姿を見て、今後の研究開発の発展が楽しみになりました。
すべてのタスクをクリアするチームも!
今回のレースでは、すべてのタスクをクリアするチームもありました! 上位3チームの階段を上り下りする様子、ドアをロボットアームで開け閉めして突破する様子をお伝えしましょう。

(画像提供:ETH Zurich / 越智貴雄)

(画像提供:ETH Zurich / 越智貴雄)

(画像提供:ETH Zurich / 越智貴雄)


(画像提供:ETH Zurich / 越智貴雄)


(画像提供:ETH Zurich / 越智貴雄)
サイバスロンで技術が進む
各チーム、個性のある機体でそれぞれの技術的な工夫を実現していました。それは、サイバスロンに向けて各チームが努力した結果です。それぞれの技術を高めるきっかけとなり、そしてそれらを披露し合うことを通じてお互いの技術を知り、高め合うチャンスとなる──これが、サイバスロンという大会の大きな意味であると、今回レースを目の前で見て実感しました。そして、技術は今後もどんどん進んでいくという希望を感じました。2020年には、スイスで第2回のサイバスロン(車いすだけでなく、義手など障害のある方に向けた技術6種類をそれぞれ競う大会)が開かれます。きっとますます進展した技術を目の当たりにすることになるでしょう。ぜひご注目を!
【関連リンク】
・トークセッション告知ブログ https://blog.miraikan.jst.go.jp/event/20190423post-852.html
・トークセッション報告ブログ https://blog.miraikan.jst.go.jp/event/20190628post-862.html
・サイバスロン車いすシリーズ日本2019 https://www.cybathlonseriesjp.com/(リンクは削除されました。また、URLは無効な場合があります。)





